谷歌近期公布的一項(xiàng)專利顯示,,其正在研發(fā)面向未來Pixel智能手機(jī)的“面部立體深度攝像頭”,,功能和蘋果用于Face ID的TrueDepth攝像頭相似。
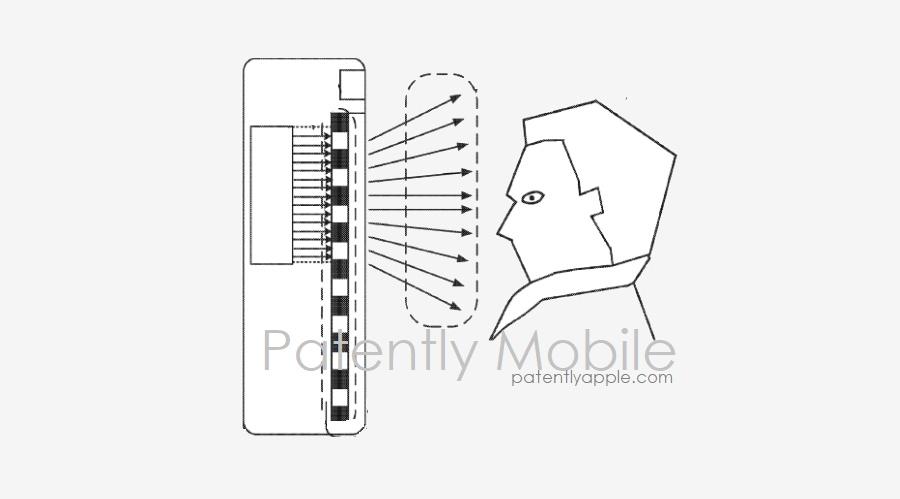
谷歌該項(xiàng)專利提出了一種立體深度(Stereodepth)攝像系統(tǒng),,核心部件是一組垂直腔面發(fā)射激光器(VCSEL),,用于發(fā)射多束紅外光束,并通過可移動透鏡對紅外光束進(jìn)行聚焦,,以投射出可變焦距的結(jié)構(gòu)化光斑圖案到被攝場景中,。
與蘋果TrueDepth系統(tǒng)相同,谷歌方案中也包含紅外點(diǎn)陣投影器和紅外攝像頭,,前者負(fù)責(zé)投射數(shù)萬點(diǎn)的紅外光斑,,后者捕獲光斑在面部不同深度位置的形變,從而生成高精度的深度圖,。結(jié)構(gòu)化光(Structured Light)技術(shù)通過在目標(biāo)場景上投射預(yù)定義的光圖案,,并分析圖案的畸變來計(jì)算深度信息,這種方法普遍應(yīng)用于精密深度測量領(lǐng)域,,具有高分辨率,、高精度的特點(diǎn)。

谷歌專利強(qiáng)調(diào),,可移動透鏡通過機(jī)械或微型電機(jī)實(shí)現(xiàn)對VCSEL發(fā)射束焦距的動態(tài)控制,,不僅能在不同距離范圍內(nèi)獲得清晰深度圖,還能減少設(shè)備厚度和功耗,。在圖像采集方面,,系統(tǒng)采用立體攝像(Stereoscopic Imaging)或雙攝像頭架構(gòu),同時捕獲帶有投影圖案的紅外圖像,,通過對比左右或前后攝像頭視差實(shí)現(xiàn)更可靠的深度估計(jì),,并輔以專用處理芯片完成復(fù)雜的點(diǎn)云重建和三維建模運(yùn)算。為了在弱光或夜間環(huán)境下保證識別穩(wěn)定性,,專利還提到結(jié)合紅外泛光照明(Flood Illuminator),,與熱成像或近紅外照明配合,增強(qiáng)面部關(guān)鍵部位的可見性和成像對比度,,從而進(jìn)一步提升人臉解鎖和表情識別的成功率,。
與蘋果現(xiàn)有TrueDepth模塊相比,谷歌方案在投影模塊中實(shí)現(xiàn)了聚焦與圖案生成的二合一設(shè)計(jì),,利用單一光學(xué)元件同時完成光束準(zhǔn)直(Collimation)和多束分離(Beam Shaping),,從而大幅減小組件尺寸,、降低制造成本,并提高系統(tǒng)可靠性,。
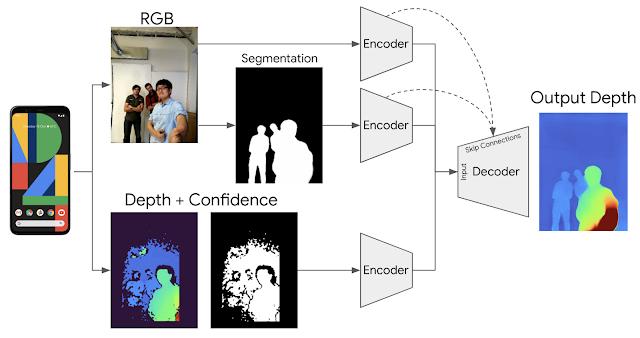
此外,,該專利還提到通過軟件算法對深度圖進(jìn)行后處理,結(jié)合機(jī)器學(xué)習(xí)模型優(yōu)化面部特征檢測和活體檢測,,實(shí)現(xiàn)防偽攻擊和抗面具欺騙的高級安全防護(hù)能力,,有望進(jìn)一步提升生物識別的安全等級與用戶體驗(yàn)。
回顧過去,,谷歌曾在Pixel 4上部署名為 “uDepth” 的紅外深度感知方案,,憑借同樣的結(jié)構(gòu)光技術(shù)可在低光環(huán)境下實(shí)現(xiàn)1/50000的誤解鎖率,但因元器件成本高昂,,谷歌于Pixel 5時代放棄該功能,。
此后,谷歌通過單純攝像頭與機(jī)學(xué)習(xí)算法,,在Pixel 7系列中恢復(fù)了面部解鎖,,但僅依賴前置攝像頭二維圖像和軟件算法,安全性及抗欺騙能力明顯低于TrueDepth硬件方案,,僅限于解鎖手機(jī),,不能用于應(yīng)用登錄和移動支付。
原創(chuàng)文章,,作者:houxiangyu,,如若轉(zhuǎn)載,請注明出處:http://hzkljs.com/doc/134277.htm











登錄后才能評論